
 English
English
| Внимание! В настоящее время данное изделие не поставляется из-за отсутствия комплектующих |

Контроллер МКУ40 предназначен для использования в качестве универсальной встраиваемой, высокопроизводительной системы прямого цифрового управления статическими преобразователями частоты и системами вторичного стабилизированного и автономного питания. Контроллер проектировался как полнофункциональная замена контроллеру МК17.3 и соответствует его габаритным и присоединительным размерам, периферии управления силовыми преобразователями и информационным интерфейсам связи контроллера МК17.3, однако при этом максимально полно использует отечественную элементную базу, в том числе последние отечественные разработки микропроцессорных систем (ARM микроконтроллер НИИЭТ К1921ВК01Т (рабочее название МС01, NT32M4F1) – 100МГц, 1 МБ flash-памяти, 192 КБ ОЗУ фирмы ОАО «НИИЭТ»). В настоящее время абсолютно все компоненты на контроллере — отечественные или произведенные в странах таможенного союза. Контроллер имеет два гальванически развязанных (изоляция 500В) интерфейса CAN и два гальванически развязанных (изоляция 500В) интерфейса RS-485. Контроллер обеспечивает прямой интерфейс с силовыми ключами преобразователей (открытый коллектор), поддерживая режимы синусоидальной и векторной широтно-импульсной модуляции для мостовых инверторов, а также прямой интерфейс с датчиками положения: импульсными, аналоговыми датчиками на элементах Холла, используя для обработки сигналов аппаратные возможности микроконтроллера (модуль захвата). 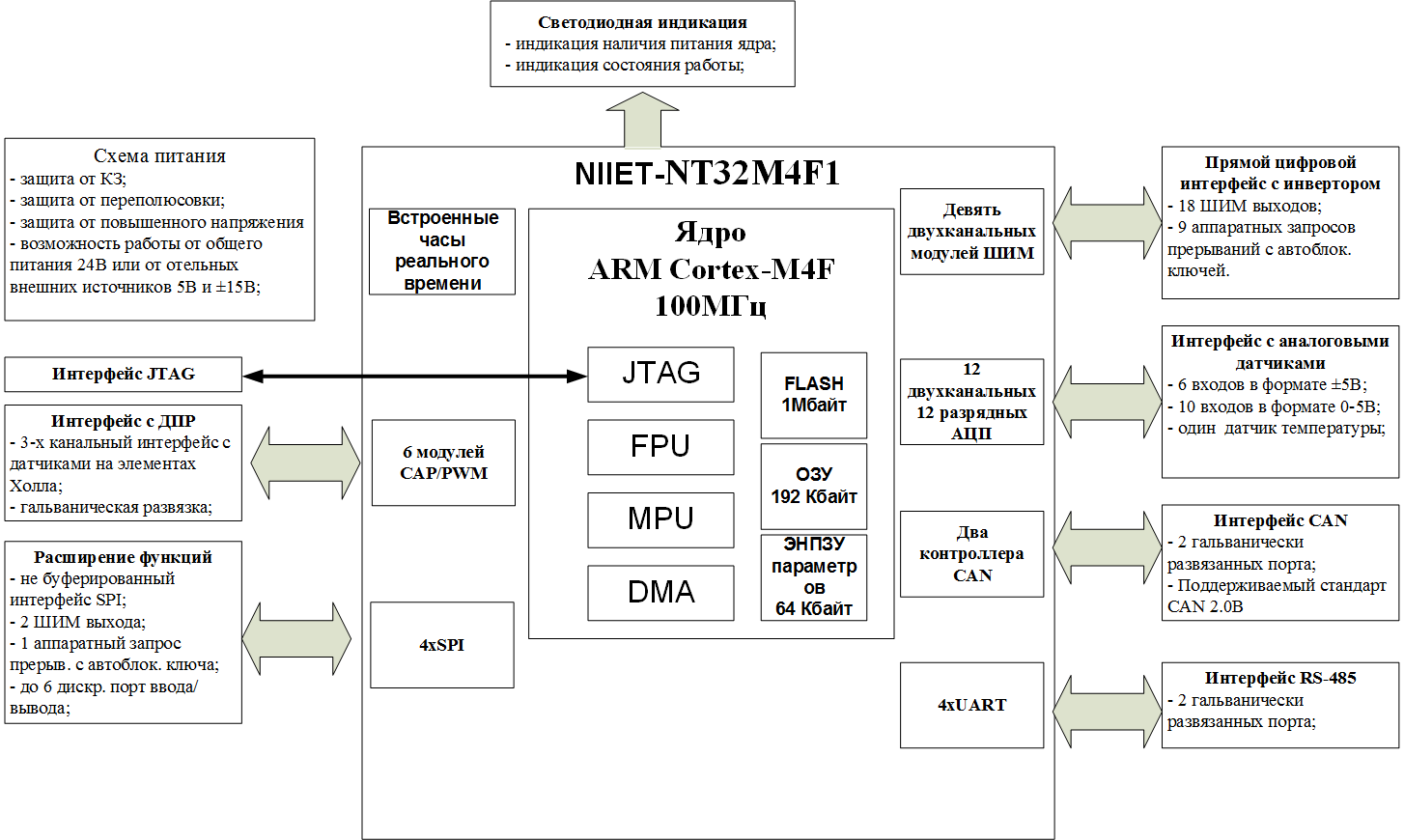
Функциональная схема контроллера МКУ40
В таблице приведена карта сигналов контроллера МКУ40
| Назначение | Количество |
| Дискретные входы/выходы: | |
| Выходы ШИМ формата открытый коллектор | 12 |
| Входы аппаратных аварий формата открытый коллектор с аппаратным блокированием ШИМ | 6 |
| Входы аппаратных аварий формата открытый коллектор для программной обработки | 2 |
| Дискретный вход/выход разъема расширения (GPIO микроконтроллера не буферированный) | 7 |
| Интерфейс с ДПР формата «дифференциальный приемник» | 3 |
| Интерфейс для эмулятора JTAG 20-ти контактный (ARM стандарт) | 1 |
| Аналоговые входы в формате: | |
| +/-5В | 6 |
| 0-5В | 10 |
| Встроенный в микроконтроллер датчик температуры | 1 |
Контроллер разработан на заказ и в виде, описанном на сайте, не поставляется. Однако по запросу мы готовы разработать аналогичный контроллер по необходимому ТЗ. Также может быть заключен договор на поставку необходимых модулей программного обеспечения в исходных кодах на языке Си с документацией. Для данного микроконтроллера (НИИЭТ К1921ВК01Т) имеются следующие программные модули:
- Драйвер CANopen (стек) с поддержкой PDO (асинхронные, динамический мэппинг 8 на прием 8 на передачу), expedited SDO, heartbeat, словарь объектов с типами данных 8,16,32 разряда целые и float. Дополнительно можно приобрести ПО для персонального компьютера — редактор словарей объектов для данного драйвера (COODEdit) и оболочку верхнего уровня (UniCON), осуществляющую параметрирование, конфигурирование, осциллографирование данных посредством работы в сети CANopen с данным драйвером.
- Модуль цифрового осциллографа, работающего совместно с драйвером CANOpen. Осциллограф позволяет записывать до четырех осциллограмм из 255 точек каждая одновременно в памяти микроконтроллера с частотой дискретизации до 80кГц. Переменные для осциллографирования выбираются пользователем из любых параметров словаря объектов CANopen. После записи осциллограммы она может быть скачана и отображена на экране компьютера при помощи ПО UniCON.
- Библиотека целочисленных вычислений в формате 8.24 (8 бит на целую часть, 24 на дробную). Включает такие фукнции как: синус, косинус, операцию деления, умножения, atan2, квадратный корень и другие, необходимые для реализации цифровой системы управления электродвигателями и источниками питания. Библиотека сделана для наиболее простой миграции с аналогичной библиотеки IQmath от Texas Instruments.
- Библиотека цифрового управления электродвигателями и источниками питания. На базе библиотеки целочисленных вычислений реализует такие программные модули, как ПИД-регулятор, цифровой фильтр первого порядка, фазные и координатные преобразования (в англоязычной литературе известные как park и clarke), блок кривой U/f, задатчик интенсивности и другие модули.
- Модуль векторной ШИМ для шестиключевого инвертора напряжения — шестисекторная, двенадцатисекторная со сменой частоты ШИМ и величины мертвого времени во время работы «на лету».
- Модуль обработки датчика положения ротора типа энкодер. Определяет частоту вращения и положение вала. Динамически переключает диапазоны измерения для обеспечения наилучшего соотношения «частота дискретизации по уровню/частота дискретизации по времени» для разных частот вращения вала.
- Модуль обработки датчика положения на дискретных элементах холла (три элемента под 120 градусов). Модуль определяет частоту вращения и угловое положение — на низкой частоте с точностью до 60 электрических градусов, на высокой частоте вращения включается модуль линейной экстраполяции, делая изменение «измеряемого» углового положение линейным и бесступенчатым.
- Модуль АЦП для измерения всех аналоговых каналов контроллера с фиксированной частотой по выбору пользователя и сохранением данных в массиве программным путем. DMA не задействуется.
- Драйвер MODBUS RTU для интерфейсов RS485. Поддерживаются операции чтения, записи регистров с любыми адресами из словаря объектов, а также чтение/запись бинарных переменных coils. Поддерживается групповое чтение объектов (групповая запись не поддерживается). Ограничение максимальной скорости передачи на уровне 38400 бит/с.
- Драйвер для работы с энергонезависимой пользовательской flash памятью микроконтроллера К1921ВК01Т. Позволяет производить побайтовое чтение/запись по любым адресам памяти. Для экономии износа флеш-памяти использует интеллектуальное постраничное кеширование данных.
- Драйвер для работы с часами реального времени микроконтроллера К1921ВК01Т.
- Демонстрационное программное обеспечение, включающее сразу несколько описанных выше модулей для скалярного или векторного управления синхронным или асинхронным электродвигателем (по заказу).
- Симулятор синхронного или асинхронного электродвигателя, модель которого в виде обобщенной машины вычисляется непосредственно в микроконтроллере. Удобен для отладки алгоритмов управления электродвигателем «на столе» с безболезненным переносом их на реальное оборудование.
Все программное обеспечение может поставляться как для среды разработки IAR EWARM версии 6.3 и выше, так и для Eclipse Luna (проверено с компилятором GCC 4.8.3 из пакета Mentor Graphics Sourcery CodeBench Lite Edition версии arm-2014.05-28-arm-none-eabi).
Документация
|
Руководство пользователя на микроконтроллер МКУ40 (техническое описание) PDF |