
 Русский
Русский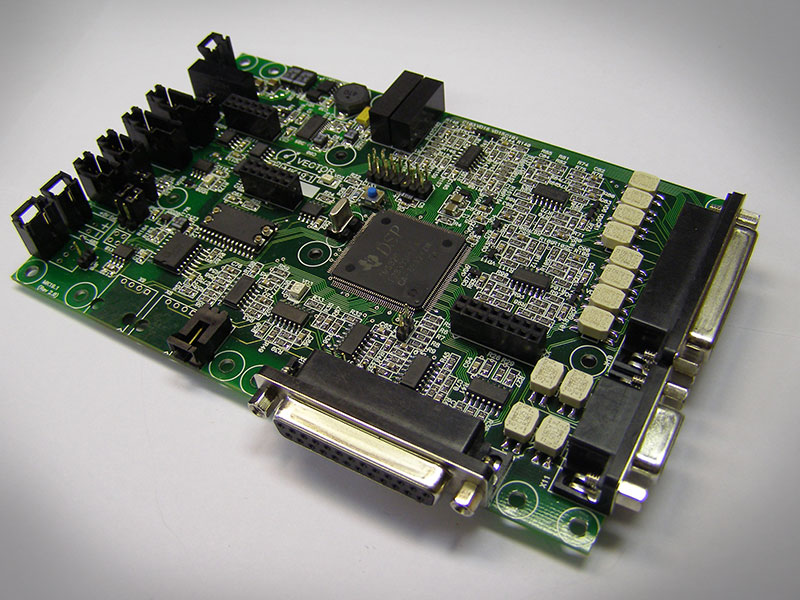
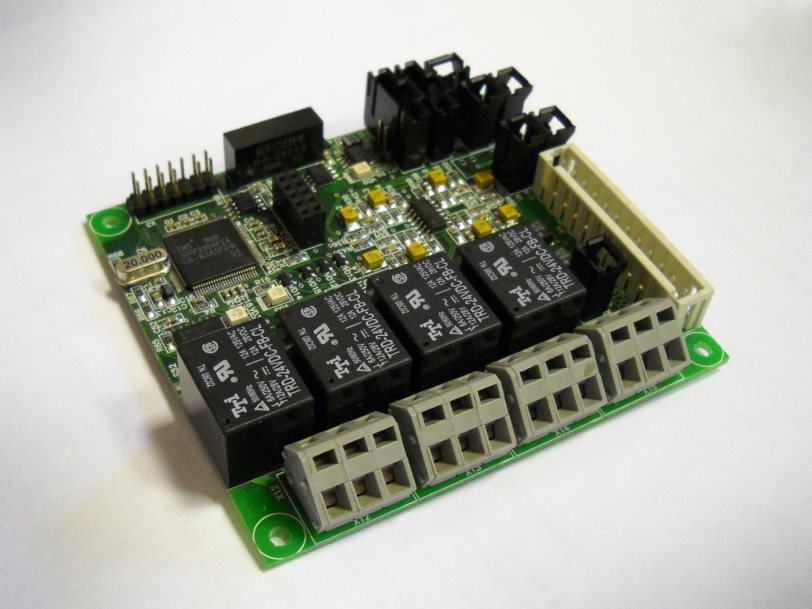
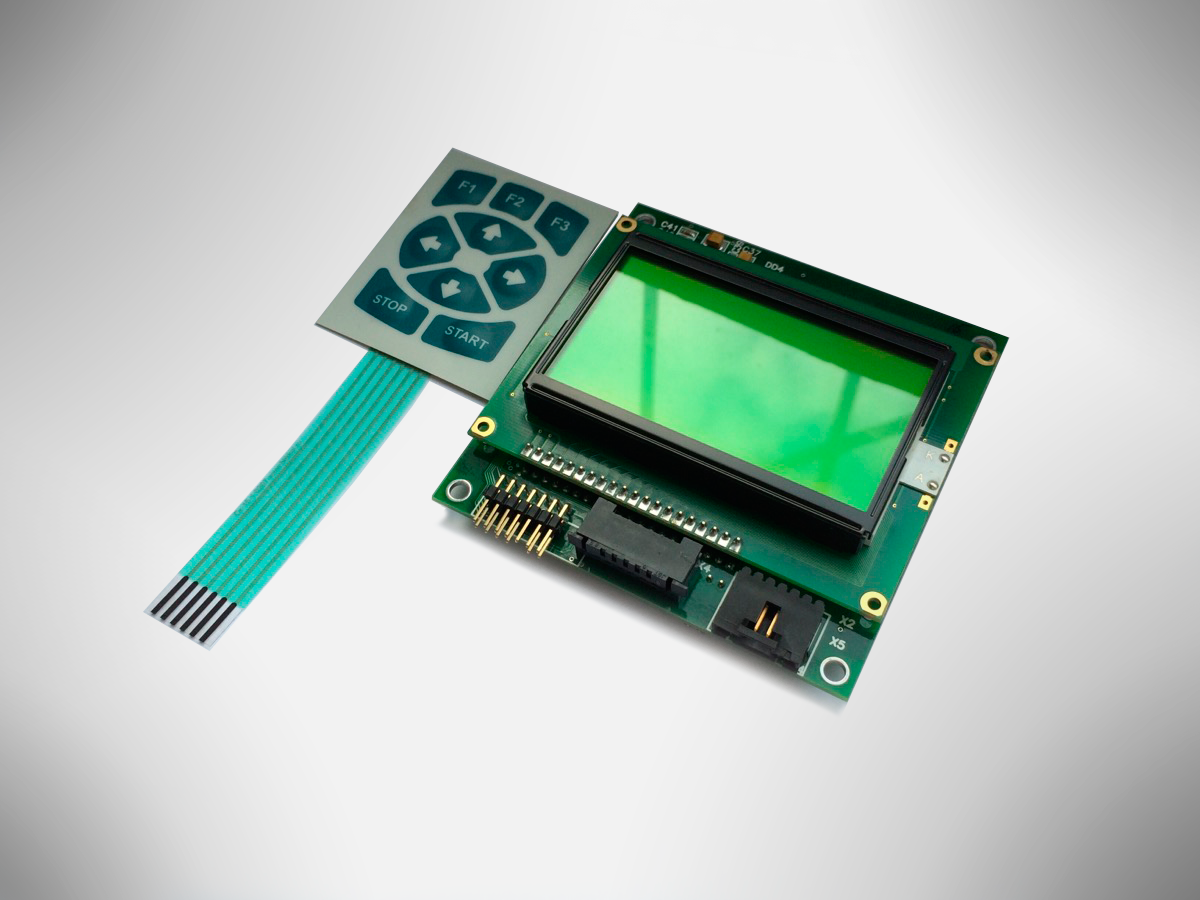
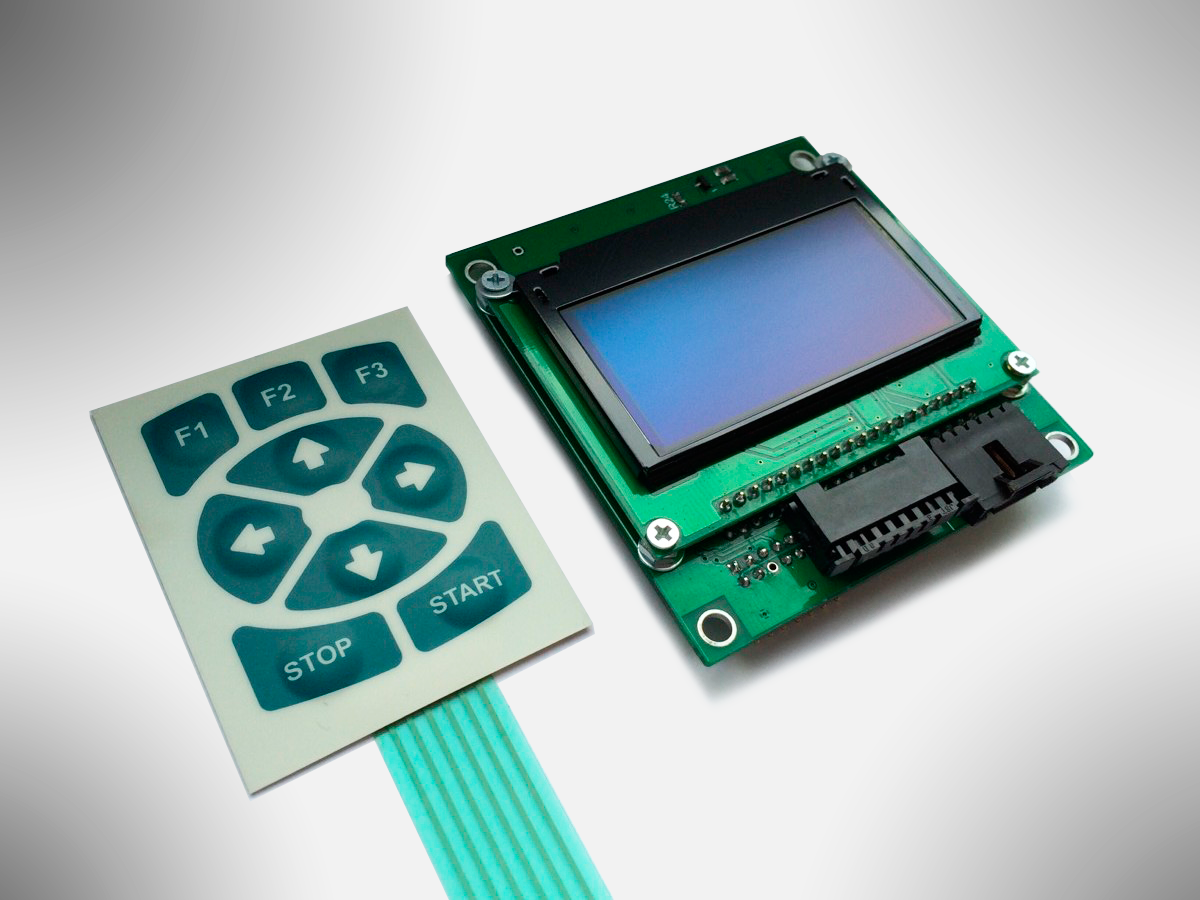
По заказу ОАО «Ижевский радиозавод» фирма ООО “НПФ ВЕКТОР” осуществила разработку современной системы управления и контроллера МК19.1 для преобразователя частоты заказчика, а также программного обеспечения для управления асинхронным двигателем. Дополнительно для решения задач конфигурирования был разработан пульт управления (в настоящее время используются более современные версия – ПУ20.3 и ПУ20.4), а для подключения внешних сигналов – плата ввода-вывода МДВВ19.1. Результатами работы стала полная конструкторская документация на элементы системы управления, что позволило заказчику самостоятельно организовать производство на собственных производственных мощностях, а также исходные коды ПО на языке Си с комментариями в системе doxygen.
Разработанное ПО системы управления ПЧ включало в себя все необходимые модули для скалярного управления АД:
- Кривая U/f
- Задатчик интенсивности (ЗИ)
- Режим кратковременного повышения пускового момента (буст)
- Останов привода (выбег, динамическое торможение, останов по ЗИ)
- Модуль ШИМ
- Модуль защит (с банком аварий, сохраняющимся в энергонезависимой памяти)
- Модуль предупреждений
- Рассеивание энергии торможения (тормозной резистор)
- Модуль расчета мощности и cos(fi)
- Алгоритм подхвата (пуска уже вращающегося двигателя)
- Режим пуска двигателя с поддержанием заданного тока
- Расчет текущих параметров привода (токи, напряжения, скорость и т.п.)
- Автоматическое повторное включение после аварии
- Сторожевой таймер
- Обработка температурных датчиков
- Обход резонансных зон
- Управление перегревом
- Модуль управления платой ввода вывода
- Драйвер CANopen для взаимодействия с пультом и платой ввода-вывода
- Драйвер modbus для взаимодействия с системой управления верхнего уровня
В рамках работы потребовалось провести научно-исследования по тематике автоподхвата и запуска уже вращающегося асинхронного двигателя. Данное требование определялось жесткими условиями работы оборудования заказчика. Стояла задача разработать алгоритм, который без датчика положения ротора двигателя мог произвести идентификацию текущей скорости вращения и осуществить последующий пуск и выход на заданную скорость. Дополнительной сложностью было то, что двигатель мог вращаться в любую сторону (например, за время отсутствия электропитания активный момент нагрузки мог реверсировать двигатель). Кроме того, двигатель к преобразователю частоты подключен через синусный фильтр и трансформатор, что также затрудняло идентификацию скорости. Однако такой алгоритм был разработан, промоделирован и отлажен на практике. Причем для решения задачи хватило штатных датчиков преобразователя (датчики тока фаз и напряжения шины постоянного тока) без привлечения каких-либо дополнительных внешних плат или сигналов. ПО пульта управления обеспечивало доступ к параметрам преобразователя частоты (более 300 параметров и переменных для наблюдения) с помощью драйвера CANopen. Все параметры для удобства пользователя разбивались на группы. Каждый параметр и группа имели русскоязычное название длиной до 15 символов, а также уникальный номер для более короткой адресации. Все величины отображались в абсолютных физических величинах с указанием размерности (например, токи – в амперах, напряжение – в вольтах и т.п.), имели ограничения максимума, минимума и значение по-умолчанию. Кроме того, ПО пульта имело функцию переноса параметров с одного контроллера на другой – ПУ скачивал в свою память все настройки одного преобразователя, а после подключения к другому мог их перенести на него.