
 English
EnglishНа данной странице представлено программное обеспечение, разработанное фирмой ООО «НПФ Вектор». ПО RTCON, COODEdit, ScopeOpenGL и драйвер CANopen работают совместно и представляют комплектное решение для настройки и отладки низкоуровневых систем управления на базе микроконтроллеров. Рекомендуется ознакомиться с вводной обзорной статьей по данным продуктам — «Способы отладки встраиваемых микропроцессорных систем в преобразовательной технике» или с аналогичной в нашем блоге на ресурсе habr.com.

RTCON
Управляющий интерфейс RTCON – это набор программных средств, позволяющих осуществлять мониторинг, параметрирование CANopen совместимых устройств посредством ПК, подключаемого через физический интерфейс CAN.
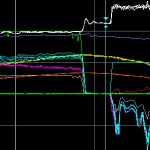
ScopeOpenGL
Программа для осциллографирования, визуализации и анализа процессов сложного объекта управления, включающего в себя от одного до нескольких десятков микропроцессорных устройств, объединенных CAN-сетью.
CoodEdit
Программа для редактирования словаря объектов CANopen. Программа позволяет управлять объектами словаря полностью в графическом режиме, а затем произвести генерирование кода со словарем объектов для микроконтроллера. Программа предназначена только для драйвера CANopen разработки ООО «НПФ Вектор».
Драйвер CANopen
Программа для микроконтроллера, реализующая протокол CANopen на основе интерфейса связи CAN. Драйвер ООО «НПФ ВЕКТОР» имеет расширения по сравнению со стандартным CANopen, однако они организованы в рамках протокола CANopen и являются «надстройками», не нарушая стандарт.
Обзор предлагаемых решений в виде лекции подготовлен одним из наших сотрудников и доступен в трех частях на следующих видео. Первое видео — введение с обзором предлагаемых решений. На следующих двух видео проводится лабораторная работа по настройке ПИ-регуляторов тока в электроприводе и запуску векторной бездатчиковой системы управления: демонстрируется работа программного обеспечения RTCON и CoodEdit.
CANopen для отладки систем управления. Часть 1: Введение
CANopen для отладки систем управления. Часть 2: Настройка регуляторов тока
CANopen для отладки систем управления. Часть 3: Запуск векторного управления